详细信息
一���、产品简介
1.激光跟踪仪主要用于百米大尺度空间三维坐标的精密测量���,集激光干涉测距技术���、 光电检测技术���、精密机械技术���、计算机及控制技术���、现代数值计算理论于一体���,在大尺 度空间测量工业科学仪器中具有极高的精度和重要性���,是同时具有 μm 级别精度���、百米 工作空间的高性能光电仪器。适用于各种产品装配过程中产品外形及大型复杂夹具或型架上空间尺寸和目标点进行精确测量���,能对大型工件和构件进行尺寸测量与误差评价���、形位公差计算与评价;能对测量范围内移动目标做跟踪检测;测量结果与分析报告能图示化显示与输出;测量的原始数据和分析报告皆能按通用的几何和文本格式输出。激光跟踪仪可用于尺寸测量���、安装���、定位���、校正和逆向工程等应用���,是功能强大的计量检测工具。
2.激光跟踪仪系统设备由激光跟踪仪主机���,反射球���,反射球靶座���,重型三脚支架���, 接触式智能测头���,非接触式扫描仪���,台式计算机���,测量软件等组成���,将水平和垂直两个方向的角度测量与距离测量结合在一起���,构成一个球坐标测量系统;设备具有良好的动态品质���,应用软件先进���、可靠���、高效���,通过目标镜完成空间几何元素测点信息的获取���,并通过三维数据分析软件完成对空间几何元素尺寸���、尺寸公差与形位公差���、空间曲面与曲线的分析计算工作。
3.激光跟踪仪设备具有较强的现场测量能力,能够完成穿越现场多障碍物工况下的 测量任务,因此具有自动断光续接功能,最大限度减轻操作员的劳动强度, 并减少 穿越障碍物所带来的断光重接的等待时间;可以在狭窄的空间内进行定位和测量,有先 进合理的数据处理软件。设备具有很好的稳定性,内置主动温度控制系统,保证设备能长 时间工作。激光跟踪仪转站基于空间固定点组作为参考系���,定义激光跟踪仪转站前后位置���,其主要误差来源于空间固定点的采点误差���,空间点精度误差为10um+6um/m。
4. 激 光 跟 踪 仪 设 备 结 构 设 计 符 合ISO国 际 标 准 ���, 所有零部件和各种仪表的计量单位全部采用国际单位(SI)制。选用的仪表及控制原件精度高���、可靠性好。符合中国国家质量技术监督局的标准。
5.设备操作简单���、维修方便���、售后服务好。
二���、功能特点
1. 功能强大的主机测量系统
● 集成化控制主机设计
主机采用绝对编码器���,系统从开机到工作状态的时间为15min。测量过程中无需回到零位(鸟巢)���,同时具备激光干涉仪(IFM)与水平仪。
● 目标球断光自动锁定技术
配置快速激光光束自动搜索���、识别���、锁定功能���,遇到障碍或突然断光时���,不需要软硬件操作及人为辅助操作的情况下���,主机在 0.5 秒钟之内完成自动搜索���、识别���、锁定功能���,在整个测量范围内具有跨越障碍自动接光功能���,即在测量过程中跨越识别���、自动锁定移动中的靶标进行断光续接测量���,断光续接精度≤10µm(全量程)。目标锁定相机在断光时会在小范围内(角度范围10°)���,自动搜索到目标球���,完成断光续接���,自动锁定目标球���,全过程不需人为操作���,提高测量效率。
● HiADM测距技术
激光绝对测距(ADM)和激光干涉测距(IFM)融合技术(HiADM)���,将激光干涉测长的高动态速度与激光绝对测距功能相结合���,保证测量的极佳精度���,并实现挡光恢复。测量激光为安全等级一级的人眼安全激光���,激光管寿命不低于50000工作小时���,激光管在未达到使用时间内损坏���,我方免费维修或更换。
● 一体化气象站
一体化的环境气象站自动监视及更新环境气象参数���,周围设置主动温控系统���,可实时监控环境变化���,实时补偿温度���、空气压力和湿度对激光在空气中空气折射率的影响���,保证测量的准确性。配备空气传感器与工件传感器���,可通过软件对自身精度进行校验。
● MultiComm通信及供电
设备与电脑之间可以通过硬件触发���、有线网络或无线WIFI等多种方式数据通信���, 方便保密车间的现场使用���,最高测量数据输出速度 1000 点/秒。系统可以通过锂电池 独立供电���,锂电池便携���,便于现场使用。
● 便携性运输
集成化主机设计的激光跟踪头���,跟踪头重量小���,减小跟踪部分的转动惯量提高跟踪仪的动态响应性能。集成式的配件运输箱���,使得整个运输箱体系统体 积小���、重量轻���,具有极佳的易用性���,并且便于在不同的工作地点之间进行运输。
● 密封防护设计及环境补偿
跟踪仪具有高可靠性���,能稳定的连续工作;IP54防护等级���,保证主机免受灰尘和其他污染物的进入���,环境适用性强。设备具有温度���、湿度���、压力等环境因素影响补偿功能,设备无需进行频繁校验���,依靠自身设备的稳定性���,保证测量精度。在工作现场可以通过软件对自身精度校验。
● 工作环境
设备能在有粉尘的环境下工作���,不影响设备的正常运转并保证其测量精度���,设备 能在任何方向有溅水时���,不影响设备的正常运转并保证其测量精度���,激光跟踪仪也能在 0~40℃工作环境及中国南方高温潮湿环境下能长期稳定工作,不出现电器元器件因外部高温环境烧坏等现象, 设备使用过程中不会出现锈迹等。保证现场长时间(连续工作24小时以上)使用。
● 稳固三脚架
整个系统稳固可靠,采用稳定三脚底座支撑���,方便移动���,稳固的三角支撑系统避 免环境震动带来的精度损失。
三���、软件功能
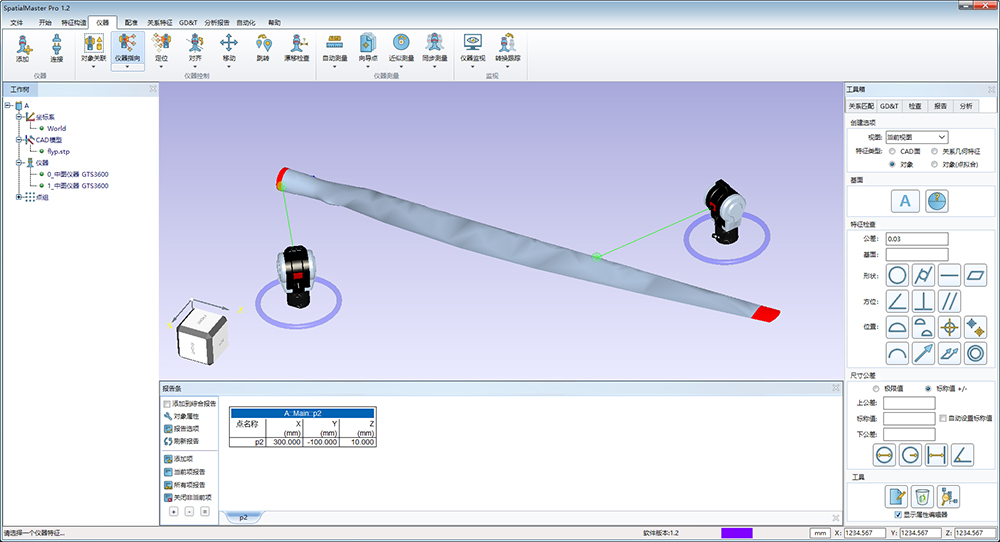
1. 具有数据分析功能:可利用静态和连续采点的方式采集数据���,并具有测量点���、 线���、面���、圆���、圆柱���、球���、圆锥���、椭圆等���,求解多种几何参数���,提供点线面���、两点以 及最佳拟合等创建坐标的方式:并可对坐标进行平移���、旋转等操作:具有标准形位公 差分析的能力���,能分析平面度���、圆度���、直线度���、圆柱度���、位置度���, 平行度���、垂直扭曲度等:具有图形显示功能���,提供 2D 和 3D 视图���,提供多种图形文件接口���,可直接 进行测量值与设计值比较���,以及个性化的测量报告模板。
2. 每套系统配置 SA Ultimate最新旗舰版正版测量软件一套(含硬狗且无时间锁)���,配置Polyworks最新正版扫描分析软件1套(含硬狗且无时间锁)���,具有中英文多 种语言界面���,可切换中文操作界面���,测量软件系统可在 Windows7 或 Windowns 10 中 英文操作系统上运行���,具有图形显示模块���,以图形的方式显示数据及测量结果。
3. 软件能连接所有 SA 支持的仪器���、关系匹配���、创建图形���, 构造���,评估和 分析���、整合多种不同仪器的观测值���、标准 CAD 导入导出(IGES���、STEP���、CATIA���、AUTOCAD���、 STL 等)���,多种报告选项(动态报告)。具备 NativeCAD 导入,例如 CATIAV4���、V5���、 CGR���、UG���、Adobe Acrobat ProExtended 等。
4. 软件提供多种坐标系建立方法���,可在自由全面上建立坐标系,具备基本及扩 展几何元素尺寸测量功能:能进行标准形位公差检测,相互位置关系计算。
5. SPC 统计分析与图形化输出报告���,文本报告输出���、显示与分析偏差:实时计 算机辅助几何构造测量���,可根据数学模型自动控制零部件装配直接导入数模���,数据 导入与导出与底层软件的衔接。并带有 CATIA 直读功能(可直读R24版本)
6. 安装的控制软件电脑中会有备份���,并和公司防火墙兼容���,计算机采用分级密码保护。所配软件5年内免费升级1次���,终身免费维护。
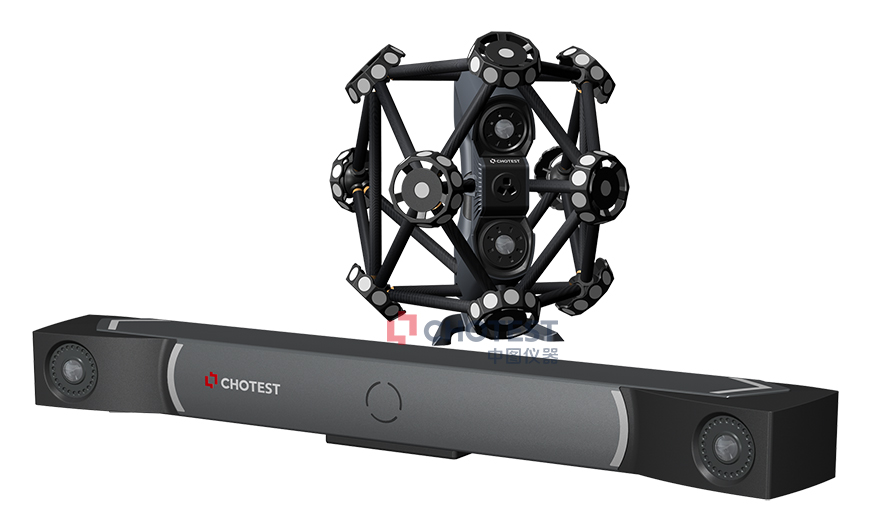
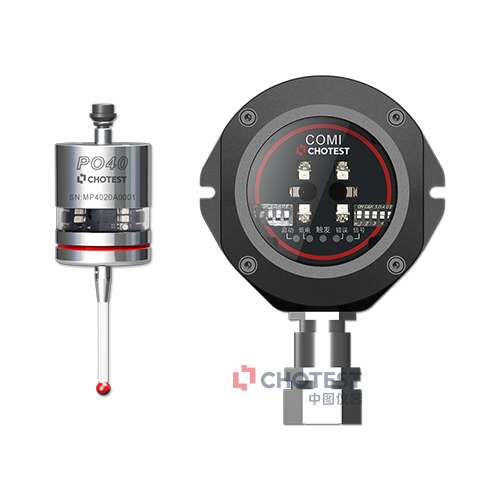
四���、接触式智能探头
iProbe 6D姿态探头由加长杆���、测头和转接座组成���,加长杆和测头能任意组合。测头标定方便���,整个标定过程在5分钟内完成。采用机器视觉技术���,通过探头的局部坐标系和系统整体坐标系的配准变换解算测球的空间位置;不仅能对点���、线���、面���、曲面等几何特征进行精确测量���,能对大部件外形进行点云扫描测量和隐藏点测量���,而且能够根据探头的精确空间姿态对被测工件的内部特征���、隐藏特征进行快速���、高精度的测量。在测量过程中带有光学和声音提示。
◆ 机器视觉空间姿态测量。
◆ 测针自动识别功能���,更换测针或者改变测针测量方向���、姿态时不需要补偿和重新校验;同时测量软件能够自动识别测针类型���,使用时不需要重新选择测针类型。
◆ 可以测量孔���、洞等内部特征���、隐藏特征的几何结构。
◆ 双探头设计���,更加灵活���,对复杂特征测量时更加高效。
◆ 电池最大续航时间:6小时。
◆ 简易随行。装上标准测头和电池后重量为���:1Kg。
五���、非接触式激光扫描仪
EyeScan非接触式激光扫描仪���,采用视觉动态跟踪技术���,实时跟踪定位扫描头的空间位置���,配合跟踪仪���,开机连接后可直接测量���,无需其他准备工作。非接触式激光扫描仪与主机须为一个系统���,便于测量数据共享���,可实现大中型物体的实时高精度扫描。能在无喷涂���、无需贴拟合反光点的情况直接扫描碳纤维���、玻璃纤维���、铝合金等材料制品;扫描高亮或精加工工件无需喷涂即可直接扫描���,而且保证扫描精度在要求精度范围内���,操作简单���,无需贴点。
◆ 动态追踪���,无需贴点
◆ 测量范围广���,支持大跨度转站
◆ 41条蓝色激光线���,不惧黑亮
◆ 碳纤维材质���,便携稳定
◆ 最高采扫描速度1360000点每秒
三���、应用场景
|

飞机装配
|

高铁装配
|
|

核电装配
|

船舶装配
|
|

风电设备装配
|

航天装配
|
|

水电装配
|

机器人运动轴校准
|
|

盾构机装配
|
汽车装配
|
|

军工装配
|

检测大型机床
|
恳请注意���:因市场发展和产品开发的需要���,本产品资料中有关内容可能会根据实际情况随时更新或修改���,恕不另行通知���,不便之处敬请谅解。